
栅格基本知识
什么是栅格?
栅格数据是将空间实体分割成若干有规则的格网矩阵,矩阵中每个格网都具有一个值,用于表示该位置的某个特征,例如温度、浓度、高程或光谱值。

栅格基本属性
栅格数据可代表实际空间实体,其基本属性即地理位置信息。栅格数据包括两种地理位置属性。
图像坐标:用格网的行列值来表示栅格地理信息,一般以左上角为原点坐标,从0开始计数;
图形坐标:用格网所代表的实地空间位置来表示栅格地理信息,横向为x轴,纵向为y轴。
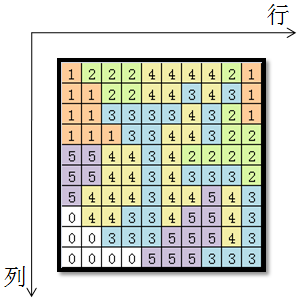 | 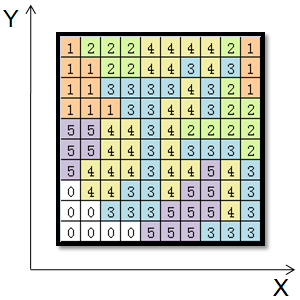 |
|---|---|
| 图像坐标 | 图形坐标 |
像元:即格网,是栅格数据的最小组成部分,每个像元或网格是代表某个区域特定部分的方块。
像元值:每个像元都会被分配一个特定的值以标识或描述单元的归属性质,这些值代表的属性包括土壤类型、高程值、浓度值、颜色或光谱反射率。
行列值:单元一行和列的形式摆放,行列单元个数则称为行列值。
分辨率:栅格数据一个像元所代表的实际距离。此处需注意,日常生活中所指的照片分辨率,是每英寸内含有的像素点数量,数量越多,分辨率越高。但在GIS行业中,分辨率的值越大,分辨率是越低的。
无效值:如果某像元被赋予无效值,那么该像元所代表的位置要么没有特征信息,要么信息不足。无效值也是栅格数据的一部分,无效但并不代表不存在。
栅格数据分类
根据栅格的像元值代表的实际意义,可将其分为两大类。
专题数据:表示了某种测量值或某个特定现象的分类,如高程、污染浓度或人口,即通常所说的DEM数据。
图像数据:单元值代表了诸如卫星图像或扫描照片的反射或发射的光或能量。我们通常所用的影像数据,即是一种图像栅格数据。
专题数据和图像数据的最大区别在于,专题数据每一个像元值代表的某种测量值,注重于每一个像元的分析处理;但图像数据大多是通过系列像元的组合显示来表现图像地物的显示效果。因此,在查看图像数据时,可看到明显的地貌特征,如河流、城镇、林地。
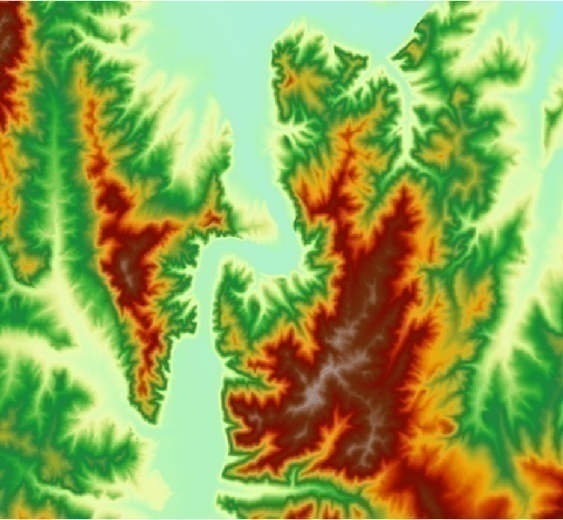 | 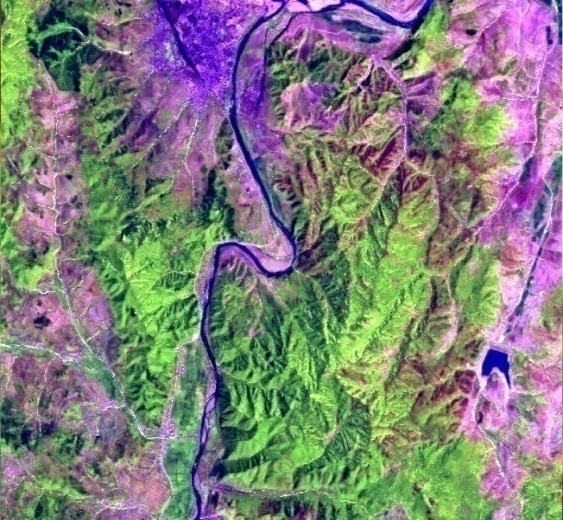 |
|---|---|
| 高程数据 | 影像数据 |
栅格存储类型
根据栅格数据像元值范围,可将栅格数据划分为七种类型,每种类型栅格数据对应的像元值范围及默认无效值如下表所示:
| 栅格数据类型 | 值范围 | 默认无效值 |
|---|---|---|
| 8位无符号整型 | 0~255 | 0 |
| 16位无符号整型 | 0~65535 | 0 |
| 16位有符号整型 | -32768~32767 | -32768 |
| 32位无符号整型 | 0~4294967295 | 0 |
| 32位有符号整型 | -2147483648~2147483647 | -2147483648 |
| 32位浮点型 | -3.4028234663852886E+38 ~ 3.4028234663852886E+38-1 | -3.4028234663852886E+38 |
| 64位浮点型 | -1.7976931348622999E+308 ~ 1.7976931348622999E+308-1 | -1.7976931348622999E+308 |
栅格波段
不管是卫星影像还是航空影像,都是通过相机或者遥感传感器将地物对不同波段的光的反射值分别记录下来,所以才有了不同的波段数据。在栅格数据中,波段这个词是从光谱上的色带引用过来的,不同波长的光对应不同的色带,每一个波段都是由传感器采集到的光谱的一段波长,波段可以表示光谱的任何部分,包括可见光、红外光和紫外光。
栅格波段这个词是从光谱上的色带引用过来的,不管是卫星影像还是航空影像,都是通过相机或者遥感传感器将地物对不同波段的光的反射值分别记录下来,每一个波段都是由传感器采集到的光谱的一段波长,波段可以表示光谱的任何部分,包括可见光、红外光和紫外光。
在栅格数据中,一个网格矩阵表示一个波段,而一个具有多个波段的栅格则包含多个在空间上重合的表示同一个空间区域的网格矩阵。通常情况下,DEM都只有一个网格矩阵,即DEM通常只有一个波段值。对于影像数据,其波段个数则与影像数据的的采集相机或传感器相关,比如高分二号卫星采用全色多光谱相机,采集影像包括空间分辨率为1的单波段影像和空间分辨率为4的四波段影像。